

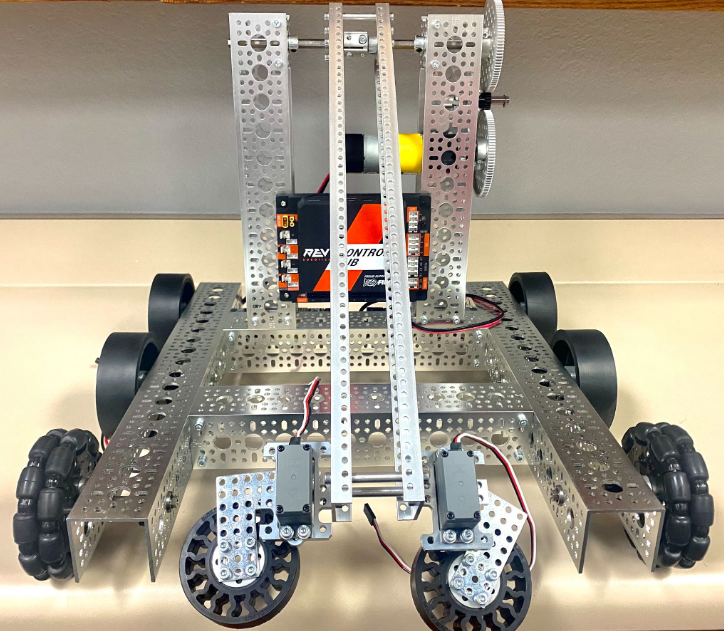
Drivetrain: 2 motors, 6 wheels, chains to connect the wheels
Used omni-wheels
Attachment: 1 motor, 2 servos, 2 gekko wheels that act as an arm/launcher
Robot Measurements: 14 ½” x 17” x 17”Drivetrain: 2 motors, 6 wheels, chains to connect the wheels
Used omni-wheels
Attachment: 1 motor, 2 servos, 2 gekko wheels that act as an arm/launcher
Robot Measurements: 14 ½” x 17” x 17”